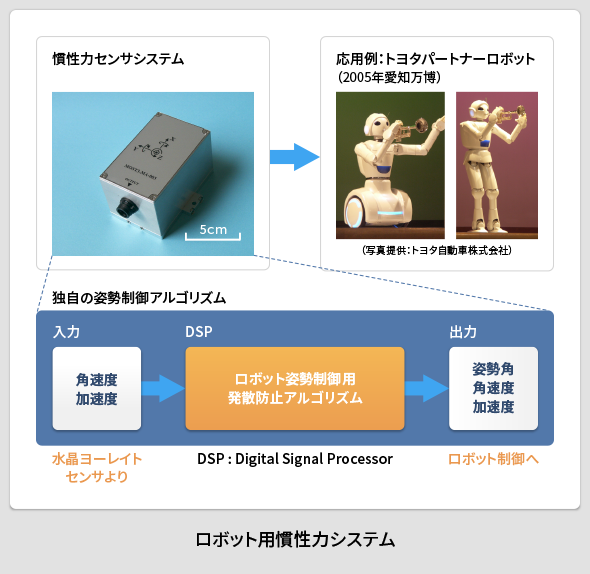
移動ロボットに搭載し、安定な2足歩行、倒立2輪走行を可能とする小型・軽量な慣性力センサシステム技術を構築しました。本システムは車載用の水晶ヨーレイトセンサを用いて小型、高信頼なシステムを実現しています。本システムは角速度と加速度信号の低周波成分を比較し、姿勢信号をフィードバック処理する独自の発散防止アルゴリズムにより、安定した姿勢角、および角速度、加速度を出力します。
本技術は、トヨタ自動車との業務委託で実施しており、2005年愛知万博におけるトヨタパートナーロボットに採用されました。
移動ロボットに搭載し、安定な2足歩行、倒立2輪走行を可能とする小型・軽量な慣性力センサシステム技術を構築しました。本システムは車載用の水晶ヨーレイトセンサを用いて小型、高信頼なシステムを実現しています。本システムは角速度と加速度信号の低周波成分を比較し、姿勢信号をフィードバック処理する独自の発散防止アルゴリズムにより、安定した姿勢角、および角速度、加速度を出力します。
本技術は、トヨタ自動車との業務委託で実施しており、2005年愛知万博におけるトヨタパートナーロボットに採用されました。