自動車の予防安全性能や利便性を高める自動運転では、周囲の状況を検知する環境センシング技術が不可欠です。照射光 が対象物で反射して戻ってくるまでの時間に基づいて測距と物体検出とを同時に実現するキーセンサとしてLiDARが注 目されてきました。しかしながら機械的な可動部を有するLiDARは小型化が必要であるという課題がありました。私たち は光アンテナから放射される光の位相を制御して光ビームを走査する光フェーズドアレイを応用すると共に、素子の温度な ど使用条件に柔軟に対応させるためDeep Neural Networkを用いた位相制御技術にも取り組んでいます。機械的な 可動部のない電子走査技術により小型化と低コスト化が更に進み、自動運転以外にも工場内の物流システムなどさまざま な場面での応用拡大が期待されます。
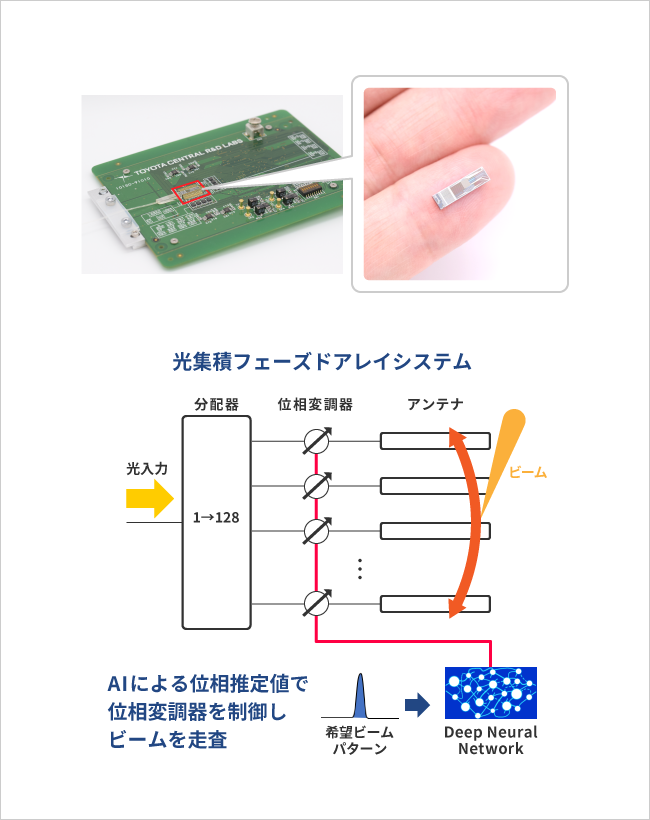
Deep Neural Networkを用いた位相制御によるビーム走査技術