
Topology optimization is a mathematical technique used to derive the optimal shape and arrangement of structures to meet specific design objectives, such as maximizing rigidity or minimizing weight. We have applied this method to various design challenges and continue to refine our approach.
While conventional topology optimization focuses on static three-dimensional structures, 4D topology optimization incorporates temporal evolution, allowing for the optimization of both shape and motion over time.
For example, we applied 4D topology optimization to the design of soft robots made from flexible, rubber-like materials. Soft robots are increasingly gaining attention due to their inherent safety in collisions and adaptability to different environments.
However, their unpredictable behavior often requires extensive trial and error during the design phase. By incorporating actuator placement and the robot's time-dependent behavior resulting from actuation, 4D topology optimization offers a more systematic and efficient design process.
We demonstrated that this approach can generate complex structures—such as limbs and a central body—that enable robots to move, rotate, and control their posture in ways that resemble living organisms. We developed and successfully validated a pneumatically powered prototype based on this method.
Beyond soft robotics, this technology holds promise for a wide range of applications, including structures capable of dynamically adjusting their size through folding and unfolding, as well as adaptive seating systems designed to reduce physical strain over time.
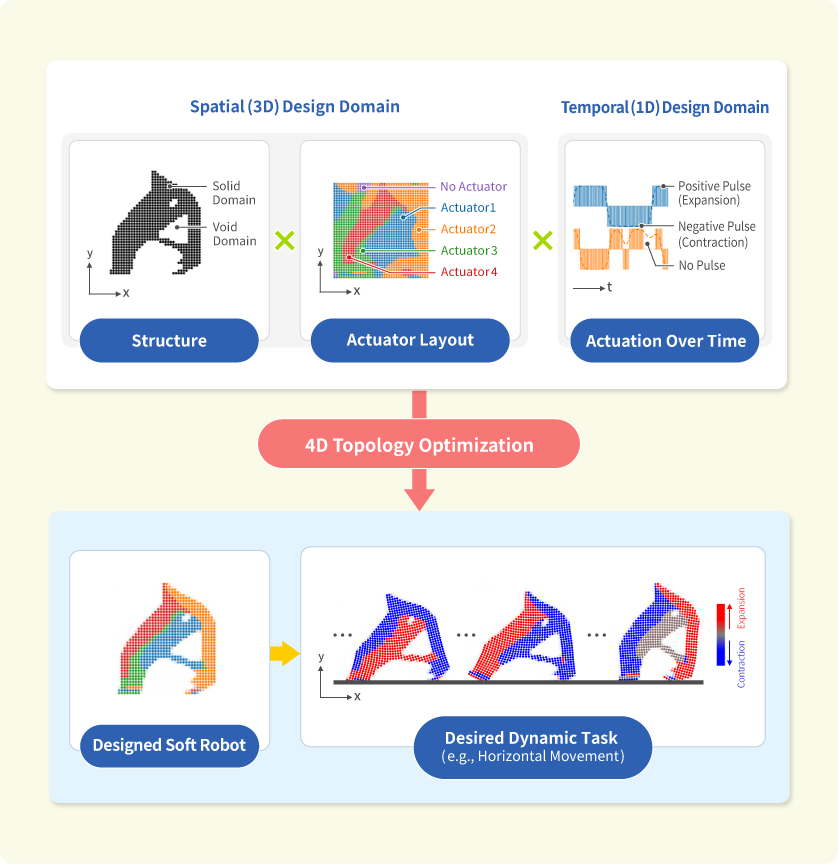
Example of simulation using 4D topology optimization (optimization of both shape and motion over time)