
In an effort to realize robotic systems that improve production efficiency, as well as that operate robustly even under complex environments and task commands, we aim to build intelligent technologies that rely on coordination among multiple robots. As one such initiative, we devised a learning algorithm that efficiently shares training data among different types of robots, which has generally been considered a challenge, for the purpose of efficiently applying high volumes of image data obtained from robot groups and sensor networks within facilities. By augmenting the image data collected with three-degrees-offreedom (DoF) mobile robots, we demonstrated that transfer learning and manipulation tasks can be performed when these data are applied as control policy training data for six-DoF robot arms. This effort is expected to significantly reduce the training costs of deep learning as applied to robot control.
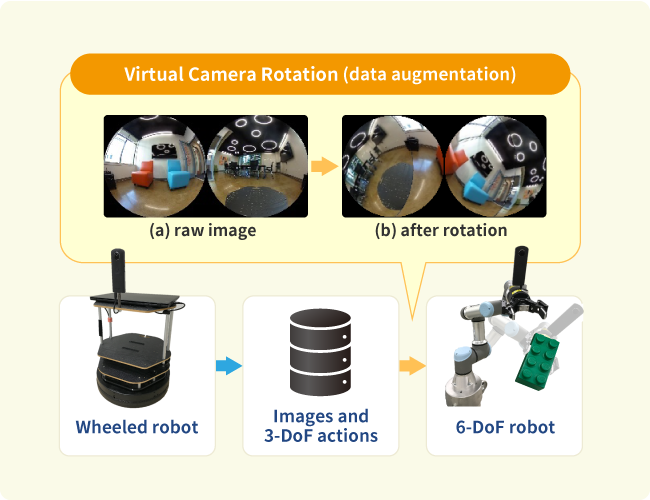
Transfer learning of control policy between different types of robots using data augmentation