
トポロジー最適化は、剛性や重量などの設計目標に対して、構造物の最適な形状や配置を数理的に導き出す技術です。当社はトポロジー最適化を、様々な設計問題に適用するとともに手法の改良に取り組んできました。
通常のトポロジー最適化は、物体の形状など三次元の構造を最適化するものですが、4Dトポロジー最適化では、時間の経過に伴う形状の変化も考慮することで、物体がどのように動くかを含めた最適化をも実現しました。
この一例として、ゴムのような柔らかい素材で作られたソフトロボットの設計問題へ応用しました。ソフトロボットは、衝突時の安全性や環境への適応力の高さから注目されていますが、挙動の予測が難しいため、その設計には多くの試行錯誤が必要でした。この課題に対し、4Dトポロジー最適化を適用することで、アクチュエータの配置や挙動の時間変化を同時に考慮した設計が可能になりました。
さらに、ロボットが生物のように移動、回転、姿勢の制御を行うための、胴体や脚のような複雑な構造が創発的に設計可能なことを示すとともに、空気圧で動くソフトロボットを試作し、実際に機能することを確認しました。
この技術は、ソフトロボットの他、折り畳み・展開により大きさが変化する構造物や、時間の経過とともに形状を変化させることで負担を軽減するシートの設計など、さまざまな応用が期待されます。
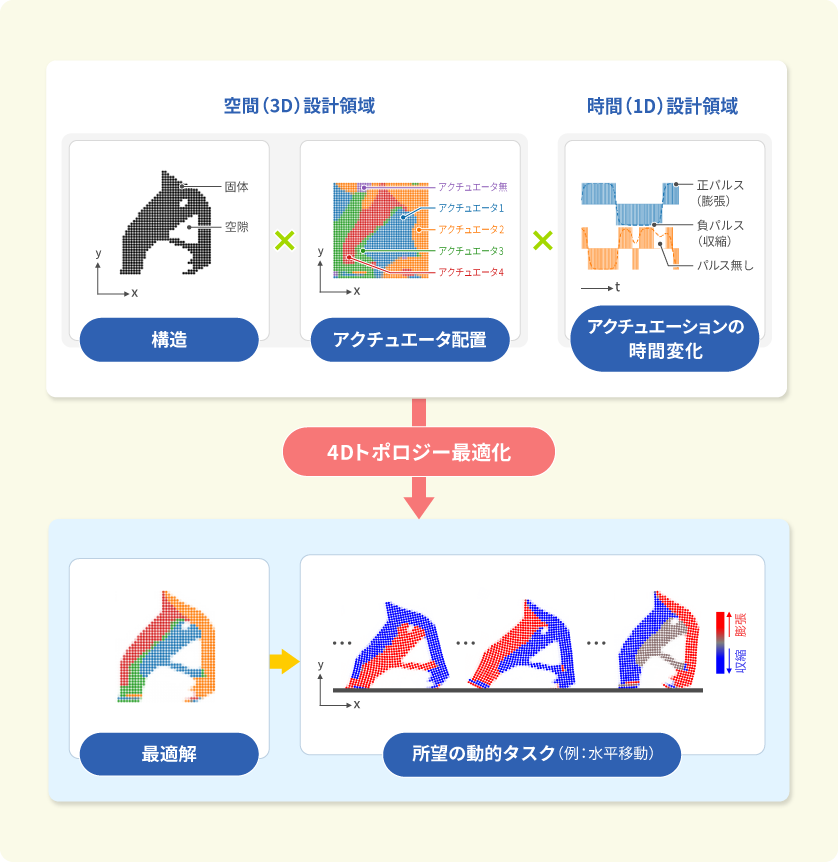
4Dトポロジー最適化(かたちと動きの同時最適化)によるシミュレーションの例