
生産効率の向上や、複雑な環境・タスク下においても頑健に稼働できるロボットシステムの実現に向け、複数ロボットの協調による知能化技術の構築を目指しています。その一つの取り組みとして、施設内におけるロボット群やセンサネットワークから得られる大量の画像データを無駄なく活用するために、従来困難とされてきた異種ロボット間において訓練データを効率よく共有する学習アルゴリズムを考案しました。3自由度の移動ロボットが収集した画像データをデータ拡張することで、6自由度のアームロボットにおける制御モデルの訓練データとして転移学習し、マニピュレーションタスクを実行できることを実証しました。これによりロボット制御に用いる深層学習の訓練コストを大幅に削減することが期待されます。
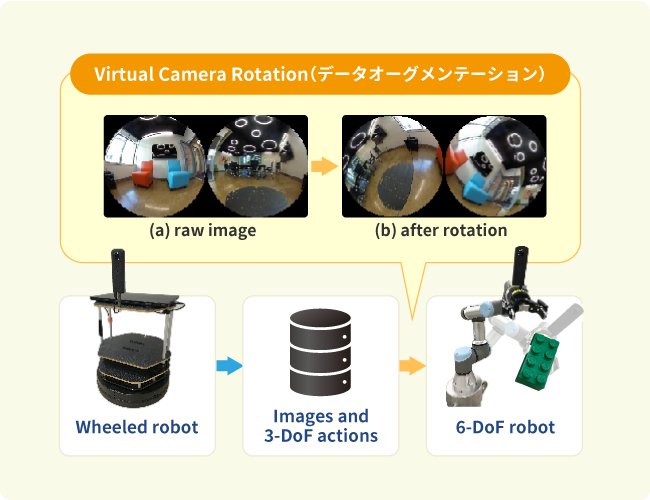
データ拡張による異種ロボット間における制御モデルの転移学習