















Decentralized Autonomous Coordination Technology
We are researching decentralized control theories to achieve intelligent coordination within the networks of infrastructure, mobility, robots, and sensors of future smart societies.
Demonstration of Decentralized Autonomous
Coordination Technology
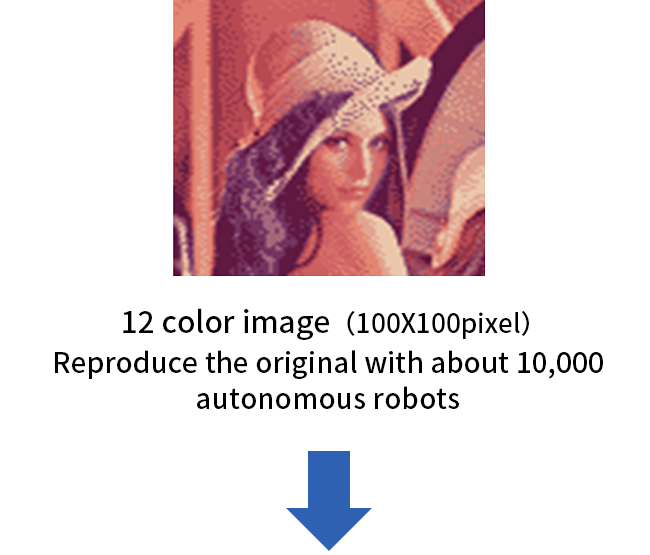
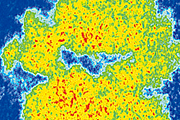
This is a simulation by around 10,000 robots to reproduce a 12-color painting. Each robot carries a panel painted with a single color. The painting is completed when the robots line up in the locations determined for their color panel. Compared to the conventional decentralized control methodology shown in the center below, the proposed method at the bottom right is capable of simulating the painting through mutual coordination between the robot positions.